

- 2024-11-15 11:26 580
- 产品价格:28800.00 元/个 起
- 发货地址:广东东莞虎门 包装说明:不限
- 产品数量:9999.00 个产品规格:不限
- 信息编号:258926608公司编号:23089974
- 卢经理 总经理 微信 13794989064
- 进入店铺 在线留言 QQ咨询 在线询价
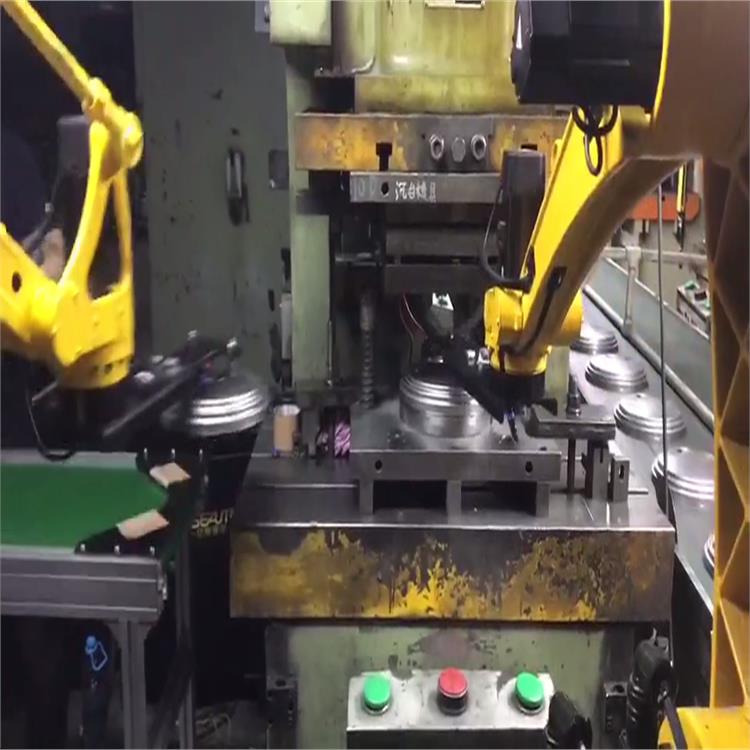
冲压机械手 上海汽配产品冲压机器人生产厂家
- 相关产品:
负载:10kg臂长:1400mm颜色:蓝色重量:170kg重复精度:0.08mm控制系统:纳博特轴数:4轴
使用冲压机器人时,注意定期检查机械手运行是否有异常,是否有漏气以及相关部件松动的情况,若有此情况时需要及时到处理,确保冲压机器人整体运行稳定性。工业冲压机器人能给我们带来什么好处
工业冲压机器人的**措施是确保机器人和工作人员的安全,如何确保快速移动的机器人不会因为过多的力量撞击或是伤害到人,这是至关重要的。当人类远程控制机器人是,他们的机械手可以轻松地完成任务。现在我们可以通过人工手来跟踪和复制人的手指运动。一家国外工厂的工会代表说,由于工业机器人接管了生产线上的一些体力工作,工人们的健康问题已经得到了缓解。在以前,从事这项工作的工人经常患肩颈部问题和腕管综合征。
随着机器人在工业领域得到更广泛的部署,这给社会带来更多的好处。工业机器人可以有效地完成工作,加快整个的生产流程,减少员工的工作时间。想让工业机器人做得越来越,就需要更多的研究来让机器人做到更地融入工作中。

自动冲压机器人的工作空间是怎样的呢
1、通常冲压冲压机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,冲压机器人实际所能达到的工作空间。
2、冲压冲压机器人说明书上提供的工作空间往往要小于运动学意义上的空间。这是因为在可达空间中,手臂位置不同时有效负载、允许达到的速度和加速度都不一样,在臂杆位置允许的限值通常要比其他位置的小些。此外,在可达空间边界上可能存在自由度退化的问题,此时的位置称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度退化现象,这部分工作空间在冲压机器人工作时都不能被利用。
3、除了在工作空间边缘,实际应用中的冲压机械手还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。

工业冲压机器人是如何识别物体进行抓取任务的呢
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。
先,我们要了解,机器人领域的视觉跟计算机领域的视觉有一些不同:机器视觉的目的是给机器人提供操作物体的信息。所以,机器视觉的研究大概有这几块:
1、物体识别:在图像中检测到物体类型等,这跟 CV 的研究有很大一部分交叉;
2、位姿估计:计算出物体在摄像机坐标系下的位置和姿态,对于机器人而言,需要抓取东西,不仅要知道这是什么,也需要知道它具体在哪里;
3、相机标定:因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物姿转换到机器人位姿。

冲压机器人日常如何维护保养呢
1、检查同步带、校正盘、同步轮:给设备通电,用适当的力气转动校正盘,能自动弹回原位时为正常;
2、检查吸盘、接头、吸盘固定螺丝:查看吸盘固定处有无脱落、破损现象,接头是否松动,吸盘紧固螺丝是否松动;
3、检查触摸屏、开关、急停按钮:目测触摸屏屏幕是否有破损,点击触摸看是否灵敏,打开开关看设备是否正常通电,按下急停按钮看设备是否能紧急停止;
4、检查拖链、波纹管:晃动波纹管看凹陷处是否破损,连接是否牢靠,前后移动手臂,看拖链移动是否正常,连接处有无破损;
5、检查接地:检测机台内的地线端子是否和公用地线接通;
6、检查各电器元件:通电后检查电控柜内各电气元件运行指示灯是否正常,安装及各线路接点是否牢靠,查看电气原件是否有烧焦现象,运行时是否会发出噪声;
7、手臂、立臂、台面及护罩的清洁:每周清理一次手臂、立臂、台面上的灰尘,并用酒精擦拭手臂、立臂及护罩;
8、检查手臂、立臂外罩紧固螺丝是否松动:用工具将手臂、立臂外罩的紧固螺丝是否松动,若有则重新紧固一遍;
9、检查机台的安装位置及水平度:目测机台脚柱相对于地面有无偏移,用水平仪测量机台的水平度。
冲压机械手,顾名思义,就要像人手一样即体现个体的灵活,又要能和帮手形成合力,完成冲压线的无人化作业,就是这样的手,才能交出冲压无人化的钥匙。而机器人单臂冲压机械手就是这样的手——轻松抓起、自在放下、随意连接、自由组合。












{kind=link}