

- 480
- 产品价格:28800.00 元/个 起
- 发货地址:广东东莞虎门 包装说明:不限
- 产品数量:9999.00 个产品规格:不限
- 信息编号:247489034公司编号:23089974
- 卢经理 总经理 微信 13794989064
- 进入店铺 在线留言 QQ咨询 在线询价
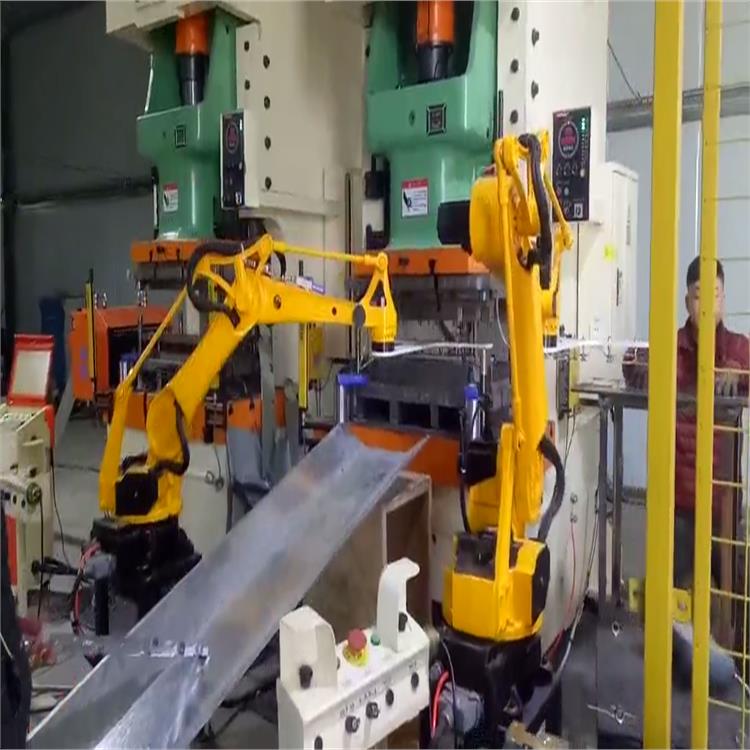
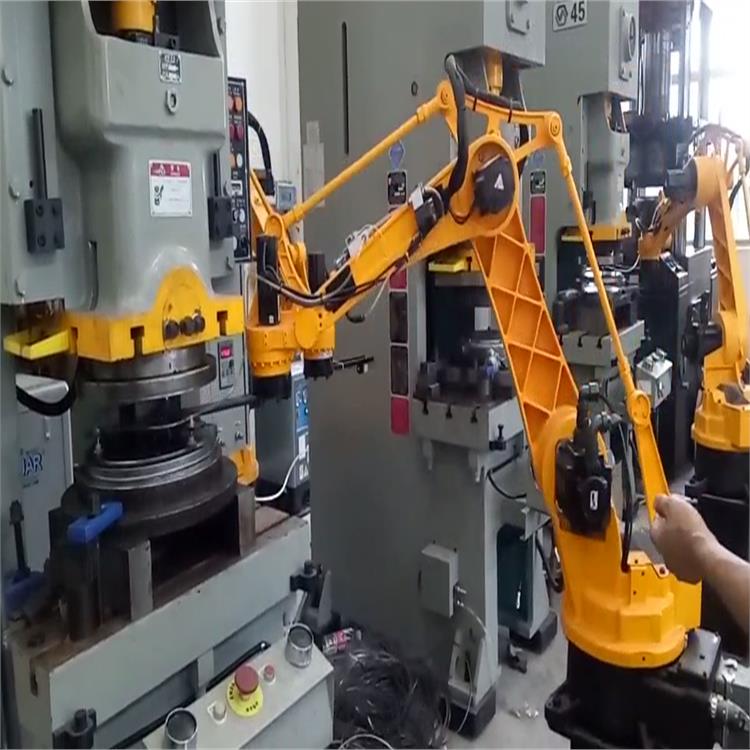
佛山汽配产品冲压机器人制造商 冲床上下料机器人
- 相关产品:
负载:10kg臂长:1400mm颜色:蓝色重量:170kg重复精度:0.08mm控制系统:纳博特轴数:4轴
四轴机器人作用:四轴冲压机械手可以将多套模具安装在统一台冲床上生产主动化生产,削减冲床投资,四轴冲压机械手削减了延续冲压的模具投资与高速冲床的投资,以通俗的设备与模具实现主动化延续生产,适合产品拉伸生产,如高压锅、水杯、滤清器等产品,变换机种时仅须简单调试即可。工业冲压机器人能给我们带来什么好处
工业冲压机器人的**措施是确保机器人和工作人员的安全,如何确保快速移动的机器人不会因为过多的力量撞击或是伤害到人,这是至关重要的。当人类远程控制机器人是,他们的机械手可以轻松地完成任务。现在我们可以通过人工手来跟踪和复制人的手指运动。一家国外工厂的工会代表说,由于工业机器人接管了生产线上的一些体力工作,工人们的健康问题已经得到了缓解。在以前,从事这项工作的工人经常患肩颈部问题和腕管综合征。
随着机器人在工业领域得到更广泛的部署,这给社会带来更多的好处。工业机器人可以有效地完成工作,加快整个的生产流程,减少员工的工作时间。想让工业机器人做得越来越,就需要更多的研究来让机器人做到更地融入工作中。

冲压机器人的动态特性是怎样的呢
冲压机器人结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
设计时应该尽量减小质量和惯量。对于冲压机器人的刚度,若刚度差,机械手的位置精度和系统固有频率将下降,从而导致系统动态不稳定;但对于某些作业,适当地增加柔顺性是有利的,理想的情况是希望机械手臂杆的刚度可调。增加系统的阻尼对于缩短振荡的衰减时间、提高系统的动态稳定性是有利的。提高系统的固有频率,避开工作频率范围,也有利于提高系统的稳定性。

工业冲压机器人是如何识别物体进行抓取任务的呢
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。
先,我们要了解,机器人领域的视觉跟计算机领域的视觉有一些不同:机器视觉的目的是给机器人提供操作物体的信息。所以,机器视觉的研究大概有这几块:
1、物体识别:在图像中检测到物体类型等,这跟 CV 的研究有很大一部分交叉;
2、位姿估计:计算出物体在摄像机坐标系下的位置和姿态,对于机器人而言,需要抓取东西,不仅要知道这是什么,也需要知道它具体在哪里;
3、相机标定:因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物姿转换到机器人位姿。

冲压机器人的有效负载指的是什么
冲压机器人的有效负载是指冲压机械手在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示机械手的负荷能力。
机械手在不同位置时,允许的可搬运重量是不同的,因此冲压机械手的额定可搬运重量是指其臂杆在工作空间中任意位置时端部都能搬运的重量。
我们公司依托在机器人自动化领域的经验和优势,重点突破生产自动化、工业机器人的系统集成、研发和生产,为用户提供完整的系统解决方案。广泛服务于汽车、摩托车、自行车、金属家具、健身器材等行业。








{kind=link}